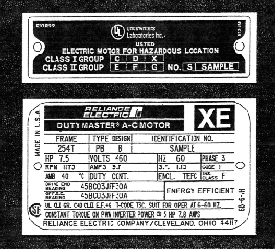
Every NEMA electric motor comes equipped with a nameplate. There is a wealth of important information contained on that piece of metal, but it is not always easily interpreted.
NEMA does mandate certain conventions, and a quick review of what the nameplate can tell you can simplify life on the plant floor in many ways.
So, what does the nameplate tell you?
NEMA nameplate data includes 18 factors:
1. Frame
10. Amps
2. Type
11. S.F.
3. Design
12. Code
4. Ident. #
13. Amb.
5. H.P.
14. Duty
6. Volts
15. Encl.
7. Hz
16. Ins. Class
8. Phase
17. Bearing #
9. R.P.M.
18. NEMA Nominal Eff. #
NEMA (National Electric Manufacturers Association)
The members of this association are most of the motor and electrical equipment manufacturers. The NEMA Standard MG1 defines basic design and dimensional parameters. These parameters are then coded onto the motor nameplate to give you a basic definition of what the motor’s characteristics and features are. Manufacturers often include additional information to further define some key motor features.
Nameplate factors include: Manufacturer’s type and frame designation; Horsepower output; Time rating; Maximum ambient temperature for which motor is designed; Insulation system designation; RPM at rated load; Frequency; Number of phases; Rated load current; Voltage; Code letter for locked rotor kVA; Design letter for medium motors; NEMA nominal efficiency; Service factor if other than 1.0; Thermally Protected; Over-temp Protection; Voltage
But what do they specifically tell you?
1. FRAME Lots of information if the motor is nearly standard. The frame size determines important mounting dimensions, such as foot hole mounting pattern, shaft diameter, and shaft height. NEMA standards do not set some dimensions that can turn out to be important if the motor must fit into a confined space, such as maximum overall height and length, and maximum conduit-box extensions.
The data in the “Frame” block can be hard to interpret when special shafts or mounting configurations are used. E.g.: 445TZ indicates that all frame dimensions are standard except for the shaft. 445TY indicates special mounting dimensions such as a special flange. If special dimension designations appear, be sure to contact the motor manufacturer for dimensional information for a replacement.
Interpreting Frame Size: the first two digits of the frame size, divided by 4, define the height of the shaft centerline from the bottom of the feet. For example, the shaft height of a 445T motor is 44 ÷ 4 = 11 in.
The third digit in the frame size determines the distance between the foot holes nearest the shaft and the opposite drive-end foot holes. Some manufacturers drill multiple foot holes in motor bases to allow mounting in short or longer frame positions. For example, a 445T motor base may have mounting holes for 444T and 445T motors.
2. TYPE MG 1 requires manufacturer’s type, but there is no industry standard. Some manufacturers use “Type” to define the motor as single or polyphase, single or multispeed, or even by type of construction. Type is of little use in defining a motor for replacement purposes unless you also note the specific motor manufacturer.
3. DESIGN Defines the torque and current characteristics of the motor. Letters are assigned the defined categories. Most motors are Design B, although the standard also defines Designs A, C, and D. Common headings on nameplates include “Des,” “NEMA Design,” and “Design.”
4. IDENT. # Brand name and it includes a “Serial No.” or other identifying number unique to that motor, including the manufacturer’s name, and its principal city and state, or country of origin. This lets the manufacturer trace the motor back through manufacturing,
5. H.P. Measure of motor’s mechanical output rating, its ability to deliver the torque required for the load at rated speed. In general: HP = (Torque) x (Speed)/5,250 Torque in lb. ft. and Speed in Revolutions Per Minute (RPM).
6. VOLTS The Voltage at which the motor is designed to operate is an important parameter. Standard voltage for motors built to NEMA MG 1 (1987) are defined in MG 1-10.30. One common misapplication is of motors nameplated (rated) at one voltage but applied on a different voltage network, using the + 10% voltage tolerance for “successful” operation. Nameplate-defined parameters for the motor such as power factor, efficiency, torque, and current are at rated voltage and frequency, and application at other than nameplate voltage will likely produce different performance.
It is common for manufacturers to identify a wide variety of voltages on one motor nameplate. A common example is a motor wound for 230 and 460 V (230/460 V) but operable on 208 V. this 208-230/460 V motor will have degraded performance at 208 V. Another common misconception is to request a motor rated at network voltage; for example, at 480 V. The NEMA standard is 460 V. The voltage rating assumes that there is voltage drop from the network to the motor terminals. Thus, the 460-V motor is appropriate on a 480-V network.
7. HZ Input frequency, usually 50 or 60 Hz. When more than one frequency is nameplated, other parameters that will differ at different input frequencies must be defined on the nameplate. The increasing use of adjustable frequency drives (AFDs) is also making it necessary to nameplate a frequency range, especially for hazardous-duty listed applications 60 cycles in U.S. and 50 cycles in other countries.
8. PHASE Number of ac power lines supplying the motor. Single and three-phase are the norms.
9. R.P.M. The speed at which rated full-load torque is delivered at rated power output is full-load speed. It is generally given as “RPM” on the nameplate. This speed is sometimes called “slip” speed or actual rotor speed rather than synchronous speed. Synchronous speed is the speed at which the motor would run if it were fixed to the AC power line frequency; that is, if it turned at the same speed as the rotating magnetic field created by the combination of winding pattern and power line frequency. An induction motor’s speed is always less than synchronous speed and it drops off as load increases. For example for 1,800rpm synchronous speed, an induction motor might have a full-load speed of 1,748rpm.
10. AMPS Rated load current in amps is at nameplate horsepower (HP) with nameplate voltage and frequency. When using current measurement to determine motor load, it is important that correction be made for the operating power factor. Unbalanced phases, under voltage conditions, or both, will cause current to deviate from nameplate AMPS. Review both motor and drive for a matched system regarding current on AFD applications.
11. S.F. Service Factor is required on a nameplate only if higher than 1.0. Industry standard service factor includes 1.15 for open-type motors and 1.0 for totally-enclosed-type motors. It is not considered good design practice to use the rating afforded by S.F. continuously; as operating characteristics such as efficiency, power factor, and temperature rise will be affected adversely.
12. CODE Code letter defines the locked rotor kVA on a per-hp basis. Codes are defined in MG 1-10.37.2 by a series of letters from A to V. The farther the code letter from A, the higher the inrush current per hp. Replacement motors with a “higher” code may require different upstream electrical equipment, such as motor starters.
13. AMB. Maximum ambient temperature at which the motor can operate and still be within the tolerance of the insulation class at the maximum temperature rise. Often called “AMB” on the nameplate, it is measured in degrees Celsius.
14. DUTY Length of time during which the motor can safely carry its nameplate rating. Most often, this is continuous “Cont”. Some applications have only intermittent use and do not need motor full load continuously. Examples are crane, hoist, and valve actuator applications. The duty on such motors is usually expressed in minutes.
15. ENCL. Degree of protection from the environment and method of cooling. The most common are Open Drip-Proof (ODP) and Totally Enclosed Fan Cooled (TEFC).
ODP Enclosure: Open drip-proof motor allows a free exchange of air from outside the motor to circulate around the winding while being unaffected by drops of liquid or particles that strike or enter the enclosure at any angle from 0 to 15 deg downward from the vertical. (Sometimes called “Protected”)
TEFC Enclosure: Totally enclosed fan cooled motor prevents free exchange of air between inside and outside the motor enclosure, with a fan blowing air over the outside of the enclosure to aid in cooling. A TEFC motor is not considered air or water-tight; it allows outside air containing moisture and other contaminants to enter, but usually not enough to interfere with normal operation.
Special Enclosures: If contamination is a problem in a given application, most manufacturers can provide additional protection. This might include mill and chemical duty features, special insulations and internal coatings or space heaters for motors subject to extended shutdown periods where wide temperature swings could cause the motor to “breathe” contaminants.
16. INS. CLASS Industry standard classification of the thermal tolerance of the motor winding, using designation such as “A,” “B,” or “F”. The deeper into the alphabet the better. For example, class F insulation has a longer nominal life at a given operating temperature than class A, or for a given life it can survive higher temperatures.
17. BEARING # Not require by NEMA, but many manufacturers supply bearings info because they are maintenance components. Such information is usually given for both the drive-end bearing and the bearing opposite the drive end.
Most common is the “AFBMA” Number, which accurately identifies bearings and lets you buy bearings from your local IBT Branch. Some manufacturers simply indicate the bearing size and type, for example: 6309 for a size 309 ball bearing. Some manufacturers display their own bearing part numbers. Your IBT branch can cross reference these numbers to common and locally available brands.
18. NEMA (Nominal and Actual Efficiency) NEMA nominal efficiency on a nameplate represents an average efficiency of a large population of like motors. The actual efficiency of the motor is guaranteed by the manufacturer to be within a tolerance band of this nominal efficiency.
The nameplate of any electric motor is a treasury of important information about that motor. If you specify, buy, maintain, or replace motors, you should know how to read them. Your IBT rep and/or branch can help you improve your knowledge and understanding.
They will help you identify any motors you may already be using, and can also help determine which specific motors would provide the most efficient and economical replacement for your application.
For more information about nameplates, or if you need any help with electric motors, let us know.